数据库索引BTree和B+Tree
BTree
- 大多平衡查找树(Self-balancing search trees)如AVL树、红黑树,都假设数据放在内存。B树的使用是为了减少以块的形式读取磁盘数据时,访问磁盘的I/O次数
- 平衡树的操作(增删改查、最大最小值)需要$O(h)$次访问,$h$ 是树高,一般是$logn$,$n$为结点数
- B树的高度,可以通过调整树结点包含的键(或者说数据库中的索引,一个位置信息)的数目控制。一般B树结点的键的数目和磁盘块大小一样
特性:
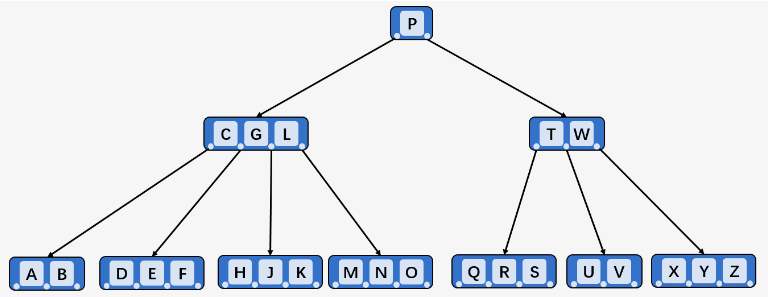
(可以参考上图,其中的字母就是Key)
所有叶子结点出现在同一层,不带信息,可以视为外部结点,指向这些结点的指针为空
每个结点包含的Key数目,由B树的最小度数$t$确定上界和下界,$t$取决于磁盘块的大小
根结点至少有一个Key
根结点以外的每个结点至少有$t-1$个key(有$t$个孩子),至多有$2t-1$个key
有时的表述为$m$阶,则
[m/2]-1 <= n <= m-1
包含$x$个key的结点有$x+1$个孩子
结点的key升序排列,两个key($k_1,k_2$)之间的孩子结点的key在$(k_1,k_2)$之内
B树的搜索从根结点开始,根据结点的孩子树做多路分支选择,每次判断进行一次磁盘I/O操作
B树查找、插入和删除操作的时间复杂度为$O(logn)$
查找
二叉查找树类似,只是B树每个结点包含多个关键字
若待查找的Key为
k:(参考上图)- 从根结点开始递归向下查找
- 如果结点包含键
k,则返回结点指针 - 如果不包含,则查找该结点的合适子结点,子结点Key均要小于等于
k - 抵达叶子结点且没有找到
k,返回null
B树节点的属性:
1
2
3
4
5int *keys; // 存储Key的数组
int t; // 最小度 (定义一个结点包含Key的个数 t-1 <= num <= 2t -1)
BTreeNode **C; // 存储子结点指针的数组
int n; // 当前结点包含的关键字的个数
bool leaf; // 是否为叶子结点
中序遍历
和二叉树中序遍历相似,先递归遍历左边子结点,在遍历当前结点内容,最后遍历最右边子结点
插入
插入Key
k,需要从根结点开始向下遍历直到叶子结点,判断插入k后是否超出结点本身最大可容纳的Key个数如果超出,则拆分一个结点的孩子,例如
x结点的孩子结点被拆开,KeyI上移,以它对结点y拆分,拆成包含Key[G、H]的结点y和包含Key[J、K]的结点z.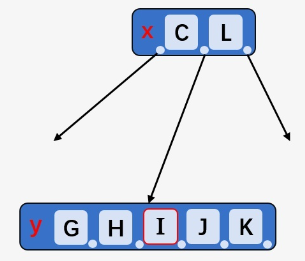
具体插入关键字
k的过程:- 初始化
x为根结点 - 当
x不是叶子结点:- 找
x下一个要访问的子结点y -
y没有满,则结点y是新的x y满了,拆分y:-
x的指针指向结点y的两部分,第二部分拷贝t-1个y的Key - 如果
k小于y中间的key, 将y的第一部分作为新的x,否则将y的第二部分作为新的x - 将
y的一个关键字上移到父结点x中
-
- 找
-
x是叶结点时,由于已经提前查分所有结点,x必定至少有一个额外的Key空间,进行简单的插入
- 初始化
为了避免回溯(可能父结点也满了,回溯会增加I/O次数),在插入新的Key前会将已满的结点提前拆分,但这可能带来很多不必要的拆分操作
下图所示,插入
I时,原来的CGL满了,拆分;又发现L的第一个左子结点满了,又要进一步拆分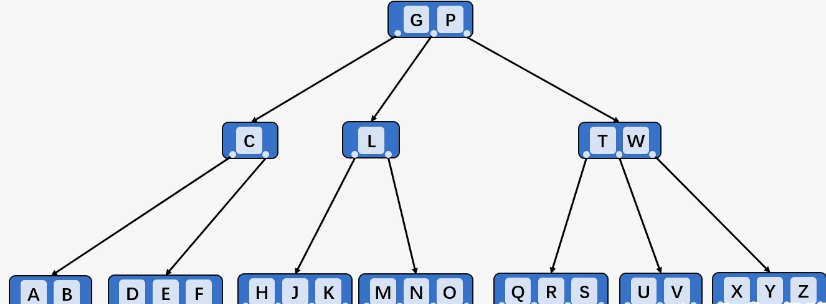
1 | // 结点y已满,分裂结点y |
删除
如果删除内部结点的Key,需要对结点的子结点重新排列
Key
k在叶结点x,删除即可Key
k在内部结点x中:x中k之前的第一个子结点y至少有t个Key,则子结点y中找到k的前驱结点k_0,递归删除k_0,将x中的k替换为k_0(例如,删除G,此时删除F并把G替换为F)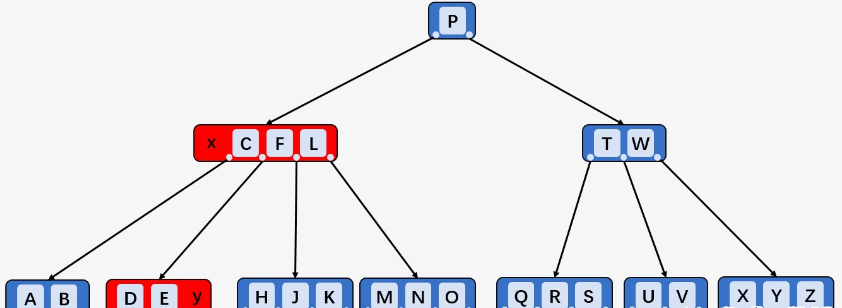
x中k之前的第一个子结点y的Key少于t,则检查结点x中k的后一个子结点``z的Key数目,如果z至少有t个Key,则找k的直接后继k_0并删除,k替换为k_0(例如,删除C,y只有2个Key,而度为3,C的后一个子结点z包含[D、E、F],其直接后继为D,删除D并将C替换为D`)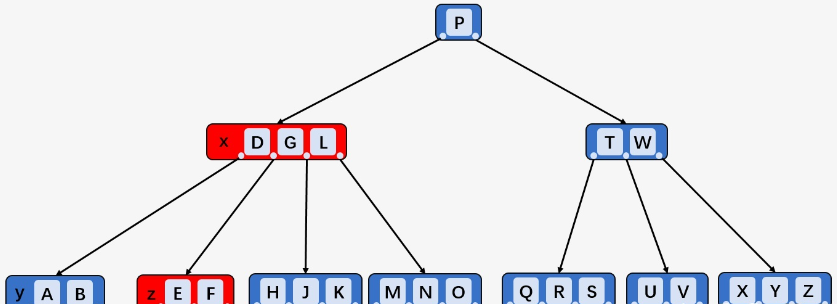
y和z都只有t -1个Key,合并k和所有z的Key到y,x将失去k和子结点z,y此时包含2t -1个Key,释放z的空间并从y中递归地删除关键字k
以上都假设结点富有,即结点删除这个key时,能根据自己所在的子树进行rebalance,不需要兄弟结点的帮助
如果结点不富有:
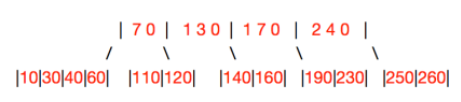
兄弟结点“富有”,从父节点要一个Key,兄弟结点补一个Key给父节点(例如,删除180,父节点的230下移,右兄弟结点
[240,250,260]的240上移)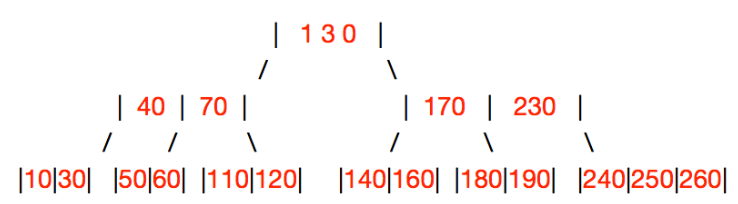
兄弟结点不富有:
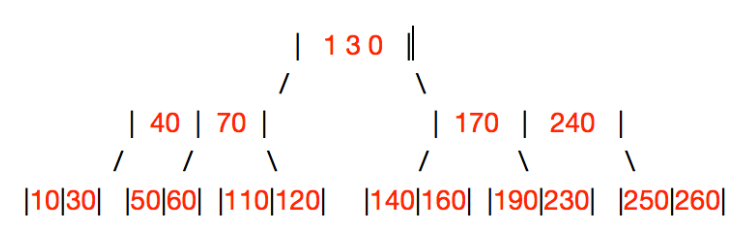
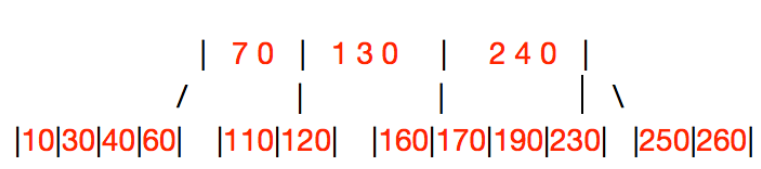
父节点不富有:先从父节点要一个key,让父节点找“叔叔结点”、“爷爷结点”(例如,上图继续删除50,要下来父节点的40,兄弟合并)
父节点富有:从父节点要一个下来,然后兄弟合并(例如,继续删除140)
B+Tree
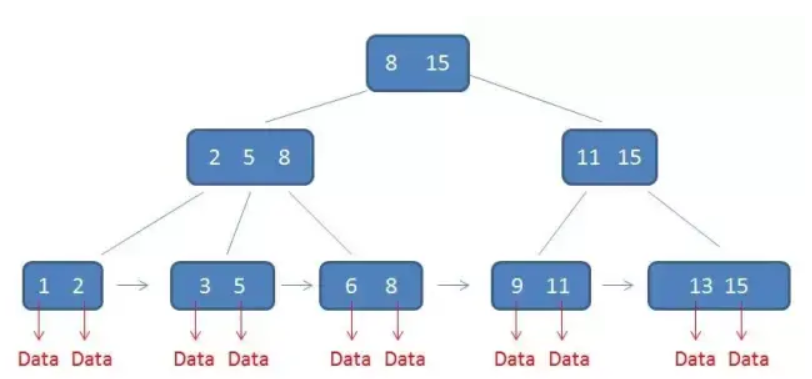
B树所有中间结点均存储数据指针(即指向了包含相应Value的磁盘文件块),B+树仅在叶子结点存储数据指针,因此所有数据地址必须要到叶子结点才能获取,每次数据查询的磁盘IO次数都一样
特征:
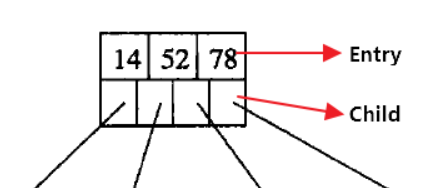
内部结点有k个Key,就会有k+1个子结点(下方第一个图为内部结点,第二个图为叶结点)
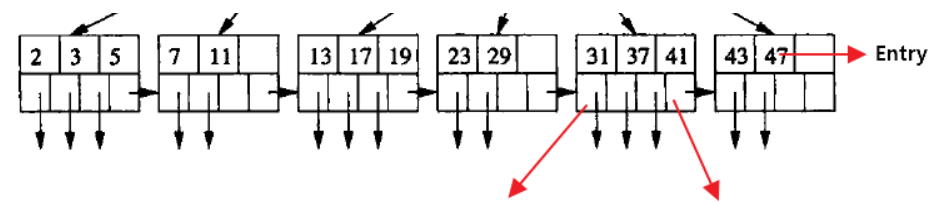
每个元素不保存数据,只用来索引,所有数据都保存在叶结点
所有的叶结点包含全部元素的信息,及指向含这些元素记录的指针,叶结点依Key升序链接
所有中间结点元素同时存在于叶结点,在子结点元素中是最大(或最小)元素
数据库的聚集索引(Clustered Index)中,叶结点包含卫星数据。非聚集索引(NonClustered Index)中,叶结点带有指向卫星数据的指针。卫星数据指索引元素所指向的数据记录,如数据库某一行
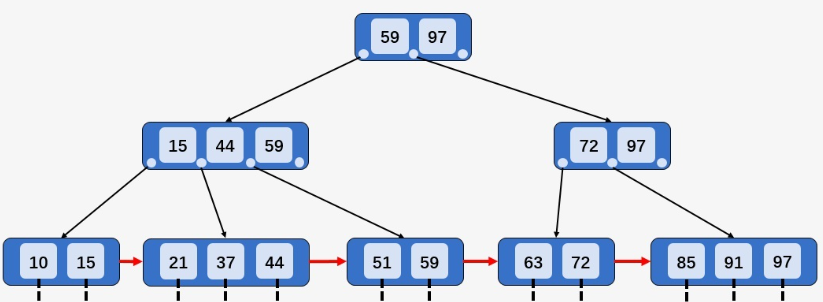
单行查询:例如查找元素3,自顶向下查询,第一次IO为
[258],第二次IO为35范围查询:例如查找3到11的范围数据。B树会自顶向下查询,查找到下限3,中序遍历到6,到8,到9,到11;B+树找到下限3时,直接通过链表指针遍历
插入
- 插入全部在叶结点上进行,不能破坏Key的相对顺序
- 结点中Key个数超过阶数,需要将结点 “分裂”
- (下图B+树的阶数
M=3,⌈M/2⌉=2、⌊M/2⌋=1)
3种情况:
1、被插入Key所在的结点,Key数目小于阶数,则直接插入(例如插入
12,结点[10,15]有2个Key)2、被插入Key所在的结点,Key数目等于阶数,则将结点分裂为两个结点,分别包含
⌊M/2⌋和⌈M/2⌉个Key,将⌈M/2⌉的Key关键字上移到双亲结点如果双亲结点的Key少于阶数,则插入操作完成(例如插入
95,结点[85、91、97]的Key数目等于阶数,分裂为[85、91]和[97],95插入[95、97],91上移至其双亲结点)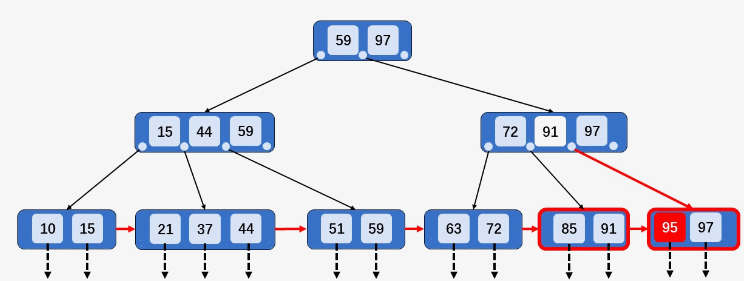
如果双亲结点的Key等于阶数,则继续分裂双亲结点(例如插入
40,37上移到父结点,父结点[15、37、44、59]的Key多于M,分裂父结点[15、37、44、59]为[15、37]和[44、59],37上移到爷爷结点[37、59、97])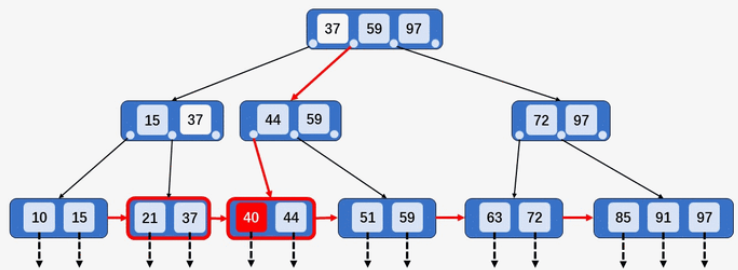
3、被插入Key比当前结点的最大值还大,需要及时修正,再做其他操作(例如插入
100,插入后根结点到该结点经过的所有结点的最后的值,都由97改为100,然后分裂)
删除
B+树中做删除Key的操作,采取如下的步骤:
- 删除该Key,如果不破坏 B+树本身的性质,直接完成删除操作(情况 1)
- 如果删除操作导致其该结点中最大(或最小)值改变,则相应改动其父结点中的索引值(情况 2)
- 在删除Key后,如果导致其结点中Key个数不足,可以向兄弟结点借,或者同兄弟结点合并(情况 3、4 和 5)
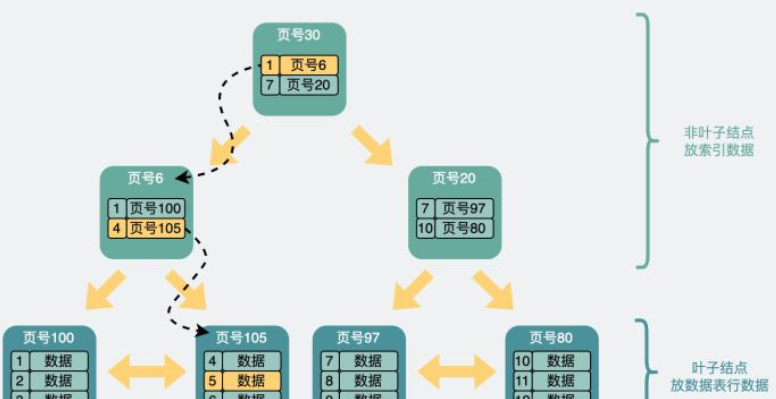
B+树在磁盘里的样子
user table:id为主键,每行数据为record,磁盘中被分为不同的数据页
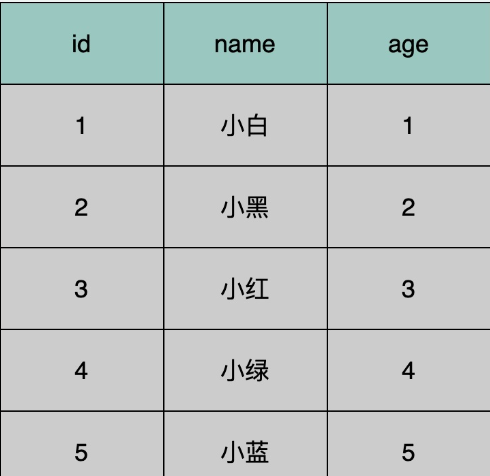

此时可以生成一个页目录,从而通过二分查找找到相应的页,再取出来判断record是否是客户端请求的record
为了加速搜索,每个页选出id最小的record,组成一个新的页(这个页的record中,只有主键id,以及所在页的页号),于是页之间有了层级关系,下图是两层B+树的结构
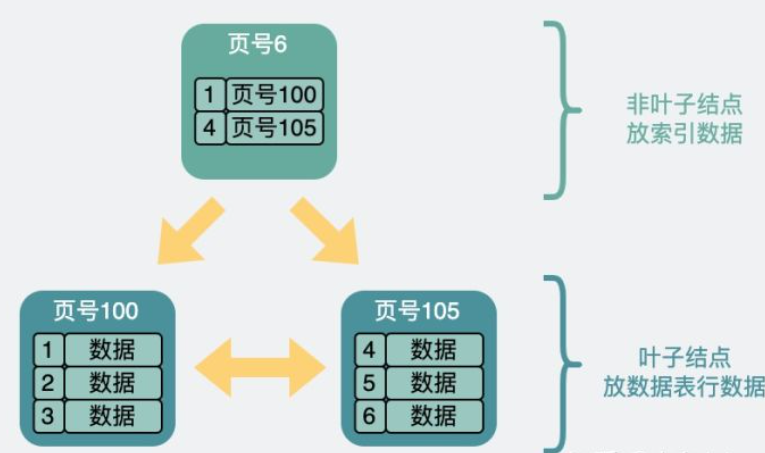
三层结构查找id为5的record:从顶层页的record入手,其中record包含主键id和页号(页地址)。此时向左最小id为1,向右最小id为7,id=5的数据如果存在必定在左子结点,于是继续判断id=5>4,在右边的数据页里,加载105号数据页,从中找到id=5的实际record