《Hands-on Machine Learning》第二部分阅读笔记(4)RNN 和 1D CNN 处理序列
使用 RNN 和 CNN 处理序列
循环神经元和层
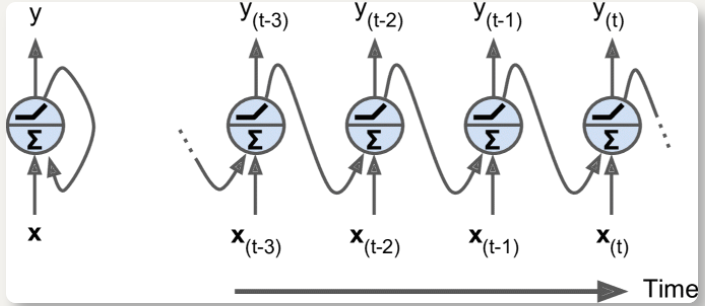
最简单的 RNN:由一个神经元接收输入,产生一个输出,并将输出发送回自己
在每个时间步
t(称为一个帧),循环神经元接收输入x[t]以及它自己的前一时间步长y[t - 1]的输出可用时间轴来表示这个微小的网络
循环神经元层: 在每个时间步
t,每个神经元都接收输入向量x[t]和前一个时间步y[t - 1]的输出向量;此时输入和输出都是向量(当只有一个神经元时,输出是一个标量)两组权重:
用于输入
x[t]——w[x]用于前一时间步长
y[t - 1]的输出——w[y]
将所有输入和时间步
t放到输入矩阵X[t],一次计算出整个 batch 的输出
记忆单元
- 保留一些跨越时间步长的状态,称为记忆单元
- 单个循环神经元或循环神经元层是非常基本的单元,只能学习短期规律,通常是 10 个时间步
- 时间步
t的单元状态,记为h[t],是该时间步的某些输入和前一时间步状态的函数
输入和输出序列
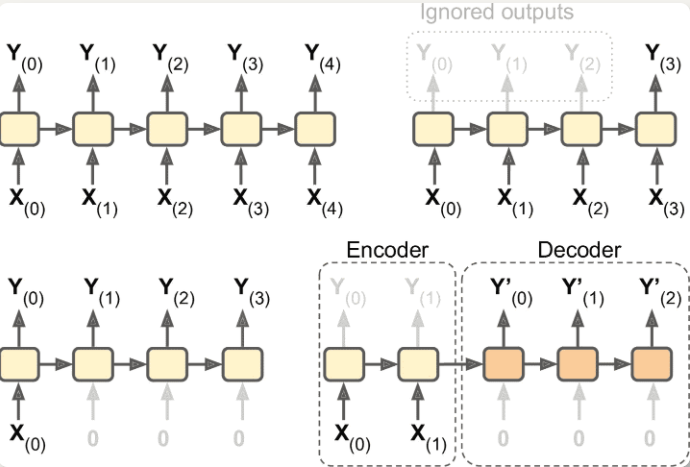
可以同时输入序列并输出序列
可以向网络输入一个序列,忽略除最后一项之外的所有输出——序列到向量;例如输入评论单词序列,输出情感评分
可以向网络重复输入相同的向量,输出一个序列——向量到序列;例如输入图像(或 CNN 输出),输出该图像标题
序列到向量 + 向量到序列:编码解码器;比用单个序列到序列的 RNN 实时地进行翻译要好得多,因为句子的最后一个单词可以影响翻译的第一句话
训练RNN
在时间上展开,然后反向传播(BPTT)
展开的网络先有正向传播,使用损失函数
C(Y[0], Y[1], …Y[T]])评估输出序列(可能会忽略一些输出),梯度在损失函数所使用的所有输出中反向流动如图,梯度流经损失函数使用的最后三个输出
Y[2],Y[3]和Y[4],但不通过Y[0]和Y[1]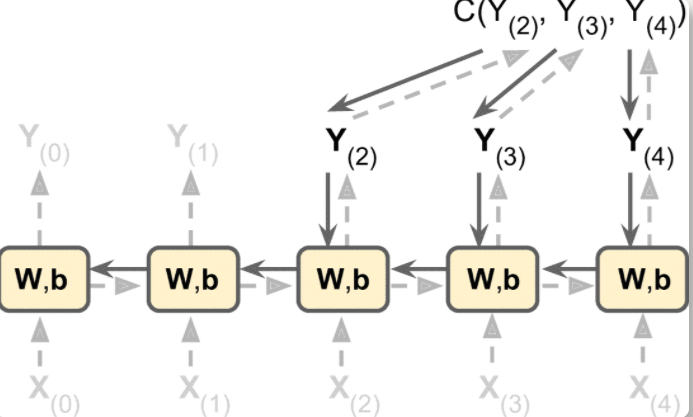
预测时间序列
generate_time_series()生成随机的时间序列,长度为n_steps,返回形状 [batch size, 时间步数, 1] 的 NumPy 数组1
2
3
4
5
6
7
8
9
10
11
12
13def generate_time_series(batch_size, n_steps):
freq1, freq2, offsets1, offsets2 = np.random.rand(4, batch_size, 1)
time = np.linspace(0, 1, n_steps)
series = 0.5 * np.sin((time - offsets1) * (freq1 * 10 + 10)) # wave 1
series += 0.2 * np.sin((time - offsets2) * (freq2 * 20 + 20)) # + wave 2
series += 0.1 * (np.random.rand(batch_size, n_steps) - 0.5) # + noise
return series[..., np.newaxis].astype(np.float32)
n_steps = 50
series = generate_time_series(10000, n_steps + 1)
X_train, y_train = series[:7000, :n_steps], series[:7000, -1]
X_valid, y_valid = series[7000:9000, :n_steps], series[7000:9000, -1]
X_test, y_test = series[9000:, :n_steps], series[9000:, -1]
输入特征通常用 3D 数组来表示,其形状是
[批次大小, 时间步数, 维度],对于单变量时间序列,其维度是 1,多变量时间序列的维度是其维度数
基线指标(Baseline metrics)
使用 RNN 最好有基线指标:朴素预测(预测每个序列的最后一个值),或使用全连接网络
1
2
3
4model = keras.models.Sequential([
keras.layers.Flatten(input_shape=[50, 1]),
keras.layers.Dense(1)
])MSE 损失、Adam 优化器、 20 个周期
简单 RNN 实现
1 | model = keras.models.Sequential([ |
默认时,Keras 循环层只返回最后一个输出。要返回每个时间步的输出,必须设置
return_sequences=True
- 循环神经网络可以处理任意的时间步,所以第一个输入维度设为
None SimpleRNN默认使用双曲正切函数激活- 初始状态
h[init]为 0,和时间序列的第一个值x[0]传递给神经元。神经元计算两个值的加权和,使用双曲正切激活,得到y[0]。简单 RNN 中,这个输出也是新状态h[0]。新状态和下一个输入值x[1]按此流程重复,直到输出最后一个值y[49]
某些模型需要先移出趋势和季节性,例如,研究网站的活跃用户数,它每月会增长 10%,需要去掉这个趋势。训练好模型之后可以将趋势加回,做最终预测
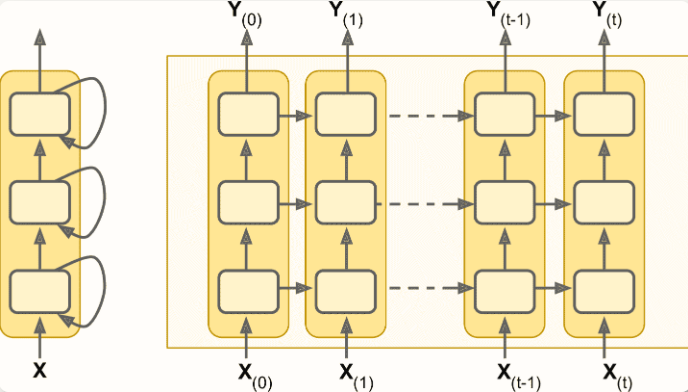
深度 RNN
将多个层堆叠
1
2
3
4
5model = keras.models.Sequential([
keras.layers.SimpleRNN(20, return_sequences=True, input_shape=[None, 1]),
keras.layers.SimpleRNN(20, return_sequences=True),
keras.layers.SimpleRNN(1)
])
- 所有循环层一定要设置
return_sequences=True,否则输出的是 2D 数组,即只有最终时间步的输出
- 所有循环层一定要设置
优化:一个神经元表示隐藏态只有一个值。RNN 大部分使用其他循环层的隐藏态的所有信息
1
2
3
4
5model = keras.models.Sequential([
keras.layers.SimpleRNN(20, return_sequences=True, input_shape=[None, 1]),
keras.layers.SimpleRNN(20),
keras.layers.Dense(1)
])
预测多个时间步
使用训练好的模型预测出下一个值,将这个值添加到输入中再预测下一个值——错误可能会累积
1
2
3
4
5
6
7
8series = generate_time_series(1, n_steps + 10)
X_new, Y_new = series[:, :n_steps], series[:, n_steps:]
X = X_new
for step_ahead in range(10):
y_pred_one = model.predict(X[:, step_ahead:])[:, np.newaxis, :]
X = np.concatenate([X, y_pred_one], axis=1)
Y_pred = X[:, n_steps:]一次预测10个值
修改输入向量,每个时间步有 10 个值
1
2
3
4series = generate_time_series(10000, n_steps + 10)
X_train, Y_train = series[:7000, :n_steps], series[:7000, -10:, 0]
X_valid, Y_valid = series[7000:9000, :n_steps], series[7000:9000, -10:, 0]
X_test, Y_test = series[9000:, :n_steps], series[9000:, -10:, 0]修改输出层
1
2
3
4
5
6model = keras.models.Sequential([
keras.layers.SimpleRNN(20, return_sequences=True, input_shape=[None, 1]),
keras.layers.SimpleRNN(20),
keras.layers.Dense(10)
])
Y_pred = model.predict(X_new)优化:之前是最后一个时间步预测 10 个值,可以在每个时间步预测接下来的 10 个值——时间步 0,模型输出一个包含时间步 1 到 10 的预测向量,在时间步 1,模型输出一个包含时间步 2 到 11 的预测向量,以此类推
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19# 目标序列,目标要包含出现在输入中的值(X_train 和 Y_train有许多重复)
Y = np.empty((10000, n_steps, 10)) # each target is a sequence of 10D vectors
for step_ahead in range(1, 10 + 1):
Y[:, :, step_ahead - 1] = series[:, step_ahead:step_ahead + n_steps, 0]
Y_train = Y[:7000]
Y_valid = Y[7000:9000]
Y_test = Y[9000:]
model = keras.models.Sequential([
keras.layers.SimpleRNN(20, return_sequences=True, input_shape=[None, 1]),
keras.layers.SimpleRNN(20, return_sequences=True),
keras.layers.TimeDistributed(keras.layers.Dense(10))
])
def last_time_step_mse(Y_true, Y_pred):
return keras.metrics.mean_squared_error(Y_true[:, -1], Y_pred[:, -1])
optimizer = keras.optimizers.Adam(lr=0.01)
model.compile(loss="mse", optimizer=optimizer, metrics=[last_time_step_mse])- 必须在每个时间步添加全连接输出层,因此使用
TimeDistributed层:将任意层(比如,紧密层)包装,在输入序列的每个时间步上使用,即输入从[批次大小, 时间步数, 输入维度]变形为[批次大小 × 时间步数, 输入维度],运行全连接层,将输出从[批次大小 × 时间步数, 输出维度]变形为[批次大小, 时间步数, 输出维度] - 此例子中,输入维度为 20,因为 SimpleRNN 维度为 20;输出为 10,因为包装的全连接层维度为 10
- 预测和评估时,只需最后时间步的输出,需要自定义指标
- 必须在每个时间步添加全连接输出层,因此使用
处理长序列
不稳定梯度
运行许多时间步,则展开的 RNN 是一个很深的网络
不能在时间步骤之间使用 BN,只能在循环层之间使用
层归一化:不在批次维度上做归一化,在特征维度上归一化;通常用在输入和隐藏态的线型组合之后
1
2
3
4
5
6
7
8
9
10
11
12
13class LNSimpleRNNCell(keras.layers.Layer):
def __init__(self, units, activation="tanh", **kwargs):
super().__init__(**kwargs)
self.state_size = units
self.output_size = units
self.simple_rnn_cell = keras.layers.SimpleRNNCell(units,
activation=None)
self.layer_norm = keras.layers.LayerNormalization()
self.activation = keras.activations.get(activation)
def call(self, inputs, states):
outputs, new_states = self.simple_rnn_cell(inputs, states)
norm_outputs = self.activation(self.layer_norm(outputs))
return norm_outputs, [norm_outputs]call()接收:当前时间步的inputs和上一时间步的隐藏states;call()先使用简单 RNN 单元,计算当前输入和上一隐藏态的线性组合,之后归一化,激活,返回输出和新的隐藏态构造器创建
LayerNormalization层1
2
3
4
5
6model = keras.models.Sequential([
keras.layers.RNN(LNSimpleRNNCell(20), return_sequences=True,
input_shape=[None, 1]),
keras.layers.RNN(LNSimpleRNNCell(20), return_sequences=True),
keras.layers.TimeDistributed(keras.layers.Dense(10))
])
短期记忆问题
- 数据在 RNN 中流动时会经历转换,每个时间步都损失了一定信息,一定时间后,第一个输入会在 RNN 的状态中消失
LSTM
设置 LSTM 层
1
2
3
4
5model = keras.models.Sequential([
keras.layers.LSTM(20, return_sequences=True, input_shape=[None, 1]),
keras.layers.LSTM(20, return_sequences=True),
keras.layers.TimeDistributed(keras.layers.Dense(10))
])设置 LSTMCell 参数(此方法使用较少,因为
RNN大多用来自定义层)1
2
3
4
5
6model = keras.models.Sequential([
keras.layers.RNN(keras.layers.LSTMCell(20), return_sequences=True,
input_shape=[None, 1]),
keras.layers.RNN(keras.layers.LSTMCell(20), return_sequences=True),
keras.layers.TimeDistributed(keras.layers.Dense(10))
])LSTM 单元:状态分为两个向量
h[t](短期记忆状态)与c[t](长期记忆状态)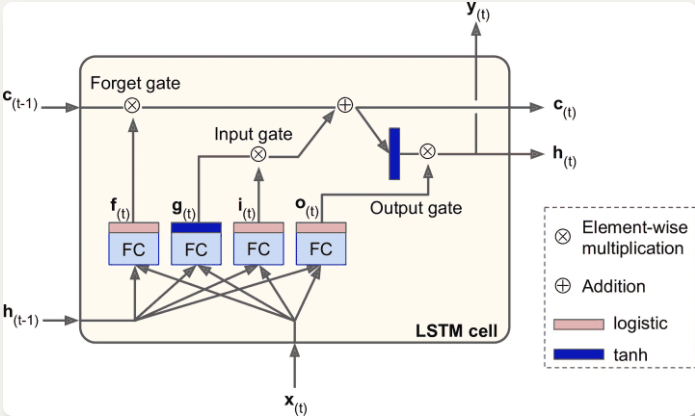 * 长期状态`c[t-1]`从左向右传播,先经过遗忘门丢弃一些记忆,后通过添加操作增加一些记忆(从输入门中选择一些记忆)
* 长期状态复制后经过 tanh 激活,被输出门过滤,得到短期状态`h[t]`
* 输入向量`x[t]`和前一时刻的短期状态`h[t-1]`传给四个不同的全连接层
* 输出`g[t]`的层是主要层,分析当前的输入`x[t]`和前一时刻的短时状态`h[t-1]`
* 其它三个全连接层是门控制器,采用 Logistic 作为激活函数,输出范围在 0 到 1 之间,提供逐元素乘法操作
* 遗忘门(`f[t]`控制)决定哪些长期记忆需要被删除
* 输入门(`i[t]`控制) 决定哪部分`g[t]`应该被添加到长期状态
* 输出门(`o[t]`控制)决定长期状态的哪些部分要读取和输出为`h[t]`和`y[t]`
* 学习识别重要输入(输入门),存储进长期状态,并保存必要的记忆(遗忘门)
* 长期状态`c[t-1]`从左向右传播,先经过遗忘门丢弃一些记忆,后通过添加操作增加一些记忆(从输入门中选择一些记忆)
* 长期状态复制后经过 tanh 激活,被输出门过滤,得到短期状态`h[t]`
* 输入向量`x[t]`和前一时刻的短期状态`h[t-1]`传给四个不同的全连接层
* 输出`g[t]`的层是主要层,分析当前的输入`x[t]`和前一时刻的短时状态`h[t-1]`
* 其它三个全连接层是门控制器,采用 Logistic 作为激活函数,输出范围在 0 到 1 之间,提供逐元素乘法操作
* 遗忘门(`f[t]`控制)决定哪些长期记忆需要被删除
* 输入门(`i[t]`控制) 决定哪部分`g[t]`应该被添加到长期状态
* 输出门(`o[t]`控制)决定长期状态的哪些部分要读取和输出为`h[t]`和`y[t]`
* 学习识别重要输入(输入门),存储进长期状态,并保存必要的记忆(遗忘门)
Keras 中,
LSTM层基于keras.layers.LSTMCell单元tf.keras.experimental.PeepholeLSTMCell支持窥孔——各个门控制器都可窥视长期状态,获取一些上下文信息
GRU
LSTM 的简化版本,实现同样的性能
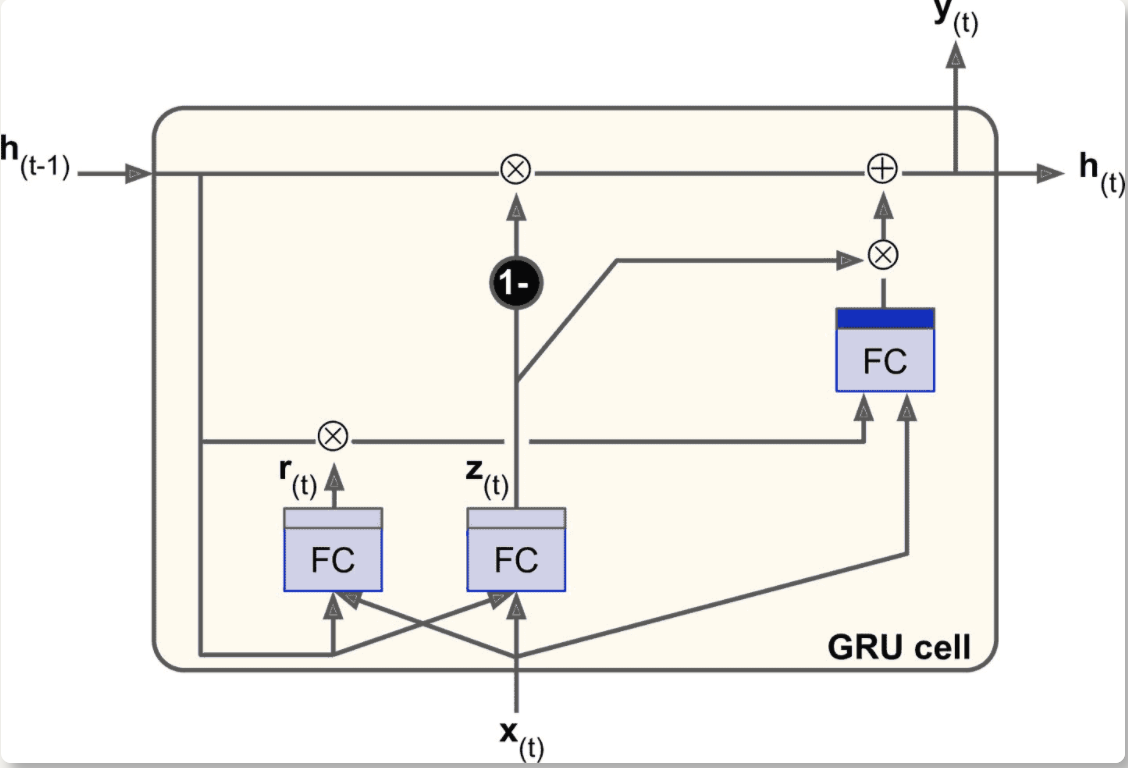
- 长期状态和短期状态合并为一个向量
h[t] - 一个门控制器
z[t]控制遗忘门和输入门,输出 1 则遗忘门打开输入门关闭 - 取消了输出门,每个时间步输出全态向量
- 增加一个控制门
r[t]控制前一状态的哪些部分呈现给主层g[t]
- 长期状态和短期状态合并为一个向量
Keras 提供
keras.layers.GRU层(基于keras.layers.GRUCell记忆单元);只需将SimpleRNN或LSTM替换为GRU
一维卷积层
1D 卷积层在序列上滑动卷积核,每个核产生一个 1D 特征映射,学到一个非常短序列模式——用 10 个核,则输出会包括 10 个 1 维的序列(长度相同)
如果 1D 卷积层的步长是 1,填充为 same,则输出序列的长度和输入序列相同
通过缩短序列,卷积层可以帮助 GRU 检测长模式
1
2
3
4
5
6
7
8
9
10
11model = keras.models.Sequential([
keras.layers.Conv1D(filters=20, kernel_size=4, strides=2, padding="valid",
input_shape=[None, 1]),
keras.layers.GRU(20, return_sequences=True),
keras.layers.GRU(20, return_sequences=True),
keras.layers.TimeDistributed(keras.layers.Dense(10))
])
model.compile(loss="mse", optimizer="adam", metrics=[last_time_step_mse])
history = model.fit(X_train, Y_train[:, 3::2], epochs=20,
validation_data=(X_valid, Y_valid[:, 3::2]))- 核大小比步长大,则所有输入会被用来计算输出
- 必须裁剪
Y_train中的前三个时间步,因为核大小是 4,卷积层的第一个输出基于输入时间步 0 到 3;并用因子 2 对Y_train做降采样

